繪logo")


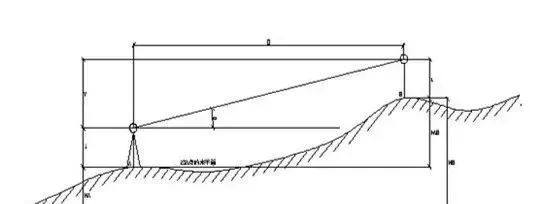
東英測(cè)繪——全站儀三角高程測(cè)量,輕松搞定一、首先講解一下三角高程測(cè)量的傳統(tǒng)方法 如下圖所示,設(shè)A、B為地面高度不同的兩個(gè)點(diǎn)。已知的A點(diǎn)高程為HA,只需知道A點(diǎn)對(duì)B點(diǎn)的高差HAB就能夠由HB=HA+HAB得到B點(diǎn)的高程HB。
圖中可得:D為A、B兩點(diǎn)之間的水平距離。 a為在A點(diǎn)觀測(cè)B點(diǎn)時(shí)的垂直角i為測(cè)站點(diǎn)的儀器高,t為棱鏡的高度HA是A點(diǎn)的高程,HB是B點(diǎn)的高程。V為全站儀望遠(yuǎn)鏡與棱鏡之間的高差(V=Dtanа)。 首先我們假設(shè)A點(diǎn)與B點(diǎn)之間的距離不遠(yuǎn),也不考慮大氣折光的影響。為了確定高差hAB,可以在A點(diǎn)進(jìn)行全站儀架設(shè),接著在B點(diǎn)豎立跟蹤桿,觀測(cè)垂直角a,并直接量取儀器的高i與棱鏡的高t,如果A、B兩點(diǎn)之間的水平距離為D,則hAB=V+i-t故 HB=HA+Dtanа+i-t。這就是三角高程測(cè)量的基本公式,但他以水平面為基準(zhǔn)面和視線成直角線為前提。所以,只有當(dāng)A點(diǎn)與B點(diǎn)之間的距離很短的時(shí)候,才比較準(zhǔn)確。當(dāng)A點(diǎn)與B點(diǎn)之間的距離較遠(yuǎn)的時(shí)候,就必須考慮地球彎曲與大氣折光的影響。這里不敘述如何進(jìn)行球差與氣差的改正,僅僅對(duì)三角高程測(cè)量新法的一般原理進(jìn)行闡述。從傳統(tǒng)的三角高程測(cè)量方法中可以看出,它具備以下兩個(gè)特點(diǎn):1、全站儀必須架設(shè)在已知高程點(diǎn)上2、要測(cè)出待測(cè)點(diǎn)的高程,必須量取儀器高和棱鏡高。 二、三角高程測(cè)量的新方法(高效) 如果能夠?qū)⑷緝x像水準(zhǔn)儀一樣任意置點(diǎn),而不是將全站儀置在已知高程點(diǎn)上,同時(shí)又在不量取儀器高于棱鏡高的情況下,利用三角高程測(cè)量原理測(cè)出待測(cè)點(diǎn)的高程,那么施測(cè)的速度將更快速。如下圖所示
假設(shè)B點(diǎn)的高程已知,A點(diǎn)的高程是未知的,這里想要通過全站儀測(cè)定其他待測(cè)點(diǎn)的高程。 首先我們由(1)式子可以得知:HA=HB-(Dtanа+i-t) (2)上式除了Dtanа即V的值可以用儀器直接測(cè)出外,i,t都是未知的。但有一點(diǎn)可以確定即儀器一旦置好,i值也將隨之不變,同時(shí)選取跟蹤桿作為反射棱鏡,假定t值也固定不變。從(2)可知:HA+i-t=HB-Dtanа=W (3)由(3)可知,基于上面的假設(shè),HA+i-t在任一測(cè)站上也是固定不變的.而且可以計(jì)算出它的值W。 這個(gè)三角高程測(cè)量的新方法操作如下: 1、將全站儀任意置點(diǎn),但是所選擇的點(diǎn)位要求能和已知高程點(diǎn)通視; 2、用儀器照準(zhǔn)已知的高程點(diǎn),測(cè)出V的值,并且算出W的值。(這個(gè)時(shí)候與儀器高程測(cè)定有關(guān)的常數(shù)測(cè)站點(diǎn)高程以及儀器高與棱鏡高均為任一值,在進(jìn)行施工測(cè)量前都不需要設(shè)定。) 3、將全站儀測(cè)站點(diǎn)的高程重新設(shè)定為W,儀器的高度有棱鏡的高度都可以設(shè)置為0 4、照準(zhǔn)待測(cè)點(diǎn)然后測(cè)出高程。下面從理論上分析一下這種方法是否正確。 結(jié)合(1)和(3)HB′=W+D′tanа′ (4)HB′為待測(cè)點(diǎn)的高程W為測(cè)站中設(shè)定的測(cè)站點(diǎn)高程D′為測(cè)站點(diǎn)到待測(cè)點(diǎn)的水平距離а′為測(cè)站點(diǎn)到待測(cè)點(diǎn)的觀測(cè)垂直角從(4)可知,不同待測(cè)點(diǎn)的高程隨著測(cè)站點(diǎn)到其的水平距離或觀測(cè)垂直角的變化而改變。將(3)代入(4)可知:HB′=HA+i-t+D′tanа′ (5)按三角高程測(cè)量原理可知HB′=W+D′tanа′+i′-t′ (6)將(3)代入(6)可知:HB′=HA+i-t+D′tanа′+i′-t′ (7)這里i′,t′為0,所以:HB′=HA+i-t+D′tanа′ (8)。由(5),(8)可知,兩種方法測(cè)出的待測(cè)點(diǎn)高程在理論上是一致的。也就是說采取這種方法進(jìn)行三角高程測(cè)量是正確的。綜上所述:將全站儀任一置點(diǎn),同時(shí)不量取儀器高,棱鏡高。仍然可以測(cè)出待測(cè)點(diǎn)的高程。測(cè)出的結(jié)果從理論上分析比傳統(tǒng)的三角高程測(cè)量精度更高,因?yàn)樗鼫p少了誤差來源。整個(gè)過程不必用鋼尺量取儀器高,棱鏡高,也就減少了這方面造成的誤差。同時(shí)需要指出的是,在實(shí)際測(cè)量中,棱鏡高還可以根據(jù)實(shí)際情況改變,只要記錄下相對(duì)于初值t增大或減小的數(shù)值,就可在測(cè)量的基礎(chǔ)上計(jì)算出待測(cè)點(diǎn)的實(shí)際高程。 三角高程測(cè)量和水準(zhǔn)高程測(cè)量都有自己的好處,多有弊端。具體采用哪一種高程測(cè)量方式,必須根據(jù)現(xiàn)場(chǎng)精度要求以及提高工作效率來控制。 以上就是全站儀三角高程測(cè)量的操作步驟,如果你還有什么不了解的地方,歡迎留言或者在線咨詢,我們會(huì)及時(shí)與您聯(lián)系。東英測(cè)繪儀器有限公司提供RTK/GPS、全站儀、水準(zhǔn)儀、經(jīng)緯儀、無人機(jī)等儀器的銷售、檢測(cè)、校正等服務(wù),也承接測(cè)繪培訓(xùn)和各種內(nèi)外業(yè)測(cè)量任務(wù),有相關(guān)的需要了解都可以留言或者在線咨詢我們,我們將詳細(xì)為你解答。 |