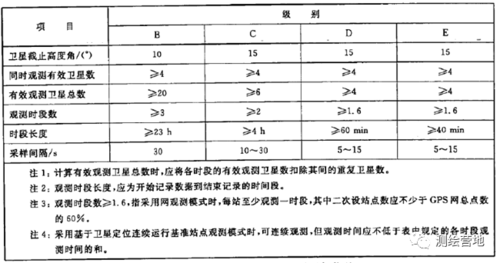
注冊測繪師學(xué)習(xí)筆記 | 大地測量13. 高斯投影采用等角橫切橢圓柱投影,是正形投影的一種。【在同一緯線上,離中央經(jīng)線越遠(yuǎn)則變形越大】;【在同一經(jīng)線上,緯度越低變形越大】,【最大值位于赤道】上。 14. 高斯投影是等角投影,無角度變形,但長度和面積有變形。為了將長度變化限制在精度允許的范圍內(nèi),通常采用【分帶】的方法。 15. 為了不產(chǎn)生負(fù)值橫坐標(biāo),坐標(biāo)原點(diǎn)向西移動500km(東Y坐標(biāo)增加了500km)。東Y坐標(biāo)前要加帶號。 16. 已知帶號求中央子午線經(jīng)度的計算:P6 = 6N - 3;P3 = 3N 17. 高斯投影正算:(B , L)向(x , y)轉(zhuǎn)換。 18. 大地主題正算:已知經(jīng)緯度、方位角、距離計算另一點(diǎn)經(jīng)緯度。 19. 三維七參數(shù)轉(zhuǎn)換,至少需要三個公共點(diǎn);二維四參數(shù)轉(zhuǎn)換,至少需要兩個公共點(diǎn)。 20. 坐標(biāo)轉(zhuǎn)換流程: ——公共點(diǎn)選取 收集和整理用于轉(zhuǎn)換的公共點(diǎn)坐標(biāo)資料,并分析選取用于轉(zhuǎn)換的公共點(diǎn),公共點(diǎn)的個數(shù)與轉(zhuǎn)換區(qū)域大小有關(guān),應(yīng)精度可靠、均勻分布覆蓋整個測區(qū)。并且最好有多余公共點(diǎn),用以檢查轉(zhuǎn)換參數(shù)的外符合精度。 ——轉(zhuǎn)換參數(shù)計算 根據(jù)已有公共點(diǎn)和轉(zhuǎn)換精度要求,確定參數(shù)計算方法和轉(zhuǎn)換模型。 二維轉(zhuǎn)換要將公共點(diǎn)換算到同一投影帶高斯直角坐標(biāo)系。 ——精度分析 根據(jù)轉(zhuǎn)換參數(shù)計算目標(biāo)坐標(biāo)系重合點(diǎn)坐標(biāo),分析轉(zhuǎn)換殘差。(內(nèi)符合精度) 計算坐標(biāo)殘差中誤差來評估坐標(biāo)轉(zhuǎn)換精度,并根據(jù)殘差限差(3倍殘差中誤差)剔除粗差。如果轉(zhuǎn)換精度評估不合格,應(yīng)重新選取重合點(diǎn)坐標(biāo)進(jìn)行參數(shù)計算。 ——坐標(biāo)計算 根據(jù)最終合格的轉(zhuǎn)換參數(shù)計算目標(biāo)坐標(biāo)系其他地物坐標(biāo)。 21. 經(jīng)緯儀DJ30,數(shù)字代表測角精度(一測回水平方向觀測中誤差)。 22. 方向觀測法測站應(yīng)檢核的限差有半測回歸零差、一測回內(nèi)2C互差、同方向各測回互差。 23. 三軸誤差 ——視準(zhǔn)軸誤差:視準(zhǔn)軸是十字絲中心與物鏡光心的連線。視準(zhǔn)軸與橫軸不正交的誤差稱為視準(zhǔn)軸誤差。用盤左、盤右觀測來削弱。 ——橫軸(水平軸)傾斜誤差:橫軸與豎軸不正交的誤差。可用盤左、盤右觀測來削弱。 ——豎軸(垂直軸)傾斜誤差:豎軸與測站鉛錘線不一致誤差。不能通過盤左、盤右觀測來削弱。 24. 經(jīng)緯儀三軸的關(guān)系:豎軸與鉛垂線重合,橫軸與豎軸正交,視準(zhǔn)軸與橫軸正交。水準(zhǔn)管軸應(yīng)垂直于豎軸,圓水準(zhǔn)器軸應(yīng)平行于豎軸。 25. 角度觀測兩個指標(biāo)差 ——垂直度盤指標(biāo)差 =(盤左讀數(shù) + 盤右讀數(shù) -360°)/ 2。 ——2C值= 盤左讀數(shù) -(盤右讀數(shù)±180°),2c值是視準(zhǔn)軸誤差的兩倍,因視準(zhǔn)軸不垂直于橫軸而產(chǎn)生。 26. 電磁波測距的改正:加常數(shù)改正、乘常數(shù)改正、歸心改正、氣象改正(高等級導(dǎo)線測量)、曲率改正、周期誤差改正。 27. 導(dǎo)線平差 ——導(dǎo)線方位角閉合差:按折角個數(shù)反號平均分配。 ——導(dǎo)線坐標(biāo)增量閉合差:按邊長反號成比例分配。 28. 【時間系統(tǒng)】 ——原子時(AT)是目前最準(zhǔn)確的時間系統(tǒng)。 ——世界協(xié)調(diào)時(UTC)是把原子時的秒長和世界時(UT)的時刻結(jié)合起來的一種時間。 ——GPS 時(GPST)與國際原子時保持有19s 的常數(shù)差,并在GPS 標(biāo)準(zhǔn)歷元1980 年1 月6 日零時與UTC 保持一致。 29. GPS系統(tǒng)由【空間部分、地面控制系統(tǒng)及用戶設(shè)備部分】組成。地面控制系統(tǒng)由主控站、監(jiān)控站、注入站所組成。 30. 衛(wèi)星星歷:參考星歷、廣播星歷-預(yù)報星歷(WGS84)、精密星歷-后處理星歷(ITRF框架)。 31. GPS信號:導(dǎo)航電文(D碼,包含星歷等)、測距碼(C/A碼-粗、P碼-精、Y碼,調(diào)制在載波上)。 32. 【GPS誤差】 ——衛(wèi)星誤差:星歷誤差(站間求差)、衛(wèi)星鐘差(站間求差)、相對論效應(yīng) ——信號傳播誤差:電離層誤差(站間求差)、對流層誤差(站間求差)、多路徑效應(yīng)影響誤差 ——接收機(jī)誤差:接收機(jī)鐘差(星間求差)、接收機(jī)對中誤差(強(qiáng)制對中)、天線相位中心偏差(站間求差) 33. 【三差相位解】: ——接收機(jī)間求一次差:消除衛(wèi)星鐘差,削弱星歷誤差、對流層和電離層誤差。 ——衛(wèi)星間求二次差:消除接收機(jī)鐘差。 ——?dú)v元間求三次差:消去整周未知數(shù)。 34. 【載波相位測量技術(shù)】是目前高精度定位的主要方法。 RTK采用了【載波相位動態(tài)實(shí)時差分】方法。 35. 靜態(tài)定位:偽距單點(diǎn)定位、CORS點(diǎn)觀測定位(A級點(diǎn))、精密單點(diǎn)定位(PPP)、靜態(tài)相對定位。 36. 動態(tài)定位:單站載波相對動態(tài)定位(1+1)、單基站網(wǎng)絡(luò)、虛擬站技術(shù)-網(wǎng)絡(luò)RTK(VRS)、主副站技術(shù)-網(wǎng)絡(luò)RTK(MAC)、區(qū)域改正數(shù)技術(shù)(FKP)、綜合內(nèi)插技術(shù)(CBI)。
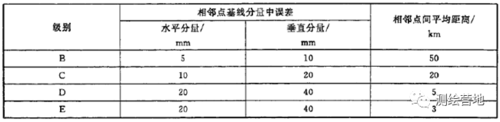
最簡異步環(huán)和附合路線邊數(shù):
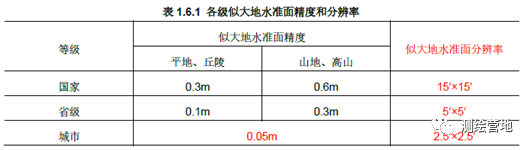
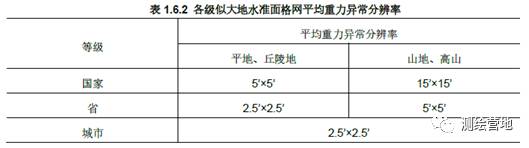
48. 1985國家高程基準(zhǔn),以青島驗(yàn)潮站1952年 - 1979年的潮汐觀測資料為計算依據(jù),測定位于青島市觀象山的中華人民共和國水準(zhǔn)原點(diǎn)的高程為72.2604 m。 49. 幾個非常重要的概念 ——大地水準(zhǔn)面:也是海拔高程系統(tǒng)的起算面,屬于物理參考面。大地水準(zhǔn)面是重力等位面,任一水準(zhǔn)面與高程基準(zhǔn)面的重力位差相等。 ——似大地水準(zhǔn)面:在海洋面上時,似大地水準(zhǔn)面與大地水準(zhǔn)面重合,屬于假定參考面。 ——正高:地面一點(diǎn)沿該點(diǎn)的【重力線】到【大地水準(zhǔn)面】的距離。正高又稱海拔高或絕對高。 ——正常高:地面一點(diǎn)沿【正常重力線】到【似大地水準(zhǔn)面】的距離。 ——大地高:從地面點(diǎn)沿【法線】到【參考橢球面】的距離。 ——大地水準(zhǔn)面差距:參考橢球面(大地高)與大地水準(zhǔn)面(正高)之差的距離,大地高-正高。 ——高程異常:似大地水準(zhǔn)面至地球橢球面的距離,大地高-正常高。 50. 對似大地水準(zhǔn)面的精化也就是按一定的分辨率精確求定高程異常。 51. 確定似大地水準(zhǔn)面的方法:①幾何法;②重力學(xué)法;③幾何與重力聯(lián)合法(或稱組合法)。 52. 似大地水準(zhǔn)面精化計算流程 ——(1)高程異常控制點(diǎn)計算 ——(2)收集似大地水準(zhǔn)面精化區(qū)域的重力資料與數(shù)字高程模型資料。 ——(3)利用重力測量數(shù)據(jù)與數(shù)字高程模型進(jìn)行重力歸算和格網(wǎng)平均重力異常計算。 ——(4)選擇適當(dāng)?shù)膮⒖贾亓瞿P停捎谩疽迫?恢復(fù)】技術(shù),計算出重力似大地水準(zhǔn)面。 ——(5)聯(lián)合計算高程異常控制點(diǎn)與重力似大地水準(zhǔn)面,求得最終似大地水準(zhǔn)面。 53. 似大地水準(zhǔn)面精度參數(shù)
54. 聯(lián)測時應(yīng)采用對稱觀測,即A-B-C…C-B-A,觀測過程中儀器停放如超過2h,則在停放點(diǎn)應(yīng)重復(fù)觀測,以消除【靜態(tài)零漂】。 55. 當(dāng)儀器靜放3小時以上時,必須在靜放前后讀數(shù),以消除【靜態(tài)零漂】。 56. 重力測量儀器 ——①絕對重力儀:FG5型,標(biāo)稱精度優(yōu)于2×10-8 ms-2,該儀器屬于現(xiàn)代激光落體可移動式重力儀。 ——②相對重力儀:拉科斯特型(簡稱LCR,分為G型和D型)金屬彈簧重力儀,用于測定基本重力點(diǎn)和一等重力點(diǎn)。 ——③相對重力儀:石英彈簧重力儀(如:ZSM、Worden)或金屬彈簧重力儀(如:LCR),用于測定二等重力點(diǎn)及加密重力點(diǎn)。 57. 國家重力等級控制測量分三級:國家重力基本網(wǎng)、國家一等重力網(wǎng)、國家二等重力點(diǎn)。 58. 大地測量數(shù)庫由大地測量數(shù)據(jù)、管理系統(tǒng)、支撐環(huán)境組成。 59. 水準(zhǔn)網(wǎng)的布設(shè)一般采用【從高級到低級】,【從整體到局部】,【逐級控制】,【逐級加密】的原則,按精度分為一、二、三、四等水準(zhǔn)測量。 60. 水準(zhǔn)路線長 ——三等水準(zhǔn)網(wǎng)附合路線長度不超過150km(四等不超過80km) ——環(huán)線不超過200km(四等不超過100km) ——同級節(jié)點(diǎn)間距不超過70km(四等不超過30km)。 61. 自動安平光學(xué)水準(zhǔn)儀每天檢校一次i角,作業(yè)開始后的7個工作日內(nèi),若i角較為穩(wěn)定,以后每隔15天檢校一次。 62. 在連續(xù)各測站上安置水準(zhǔn)儀的三腳架時,應(yīng)使其中兩腳與水準(zhǔn)路線的方向平行,而【第三腳輪換】置于路線方向的左側(cè)與右側(cè)。減弱因【豎軸傾斜】引起的誤差。 63. 一二等水準(zhǔn)標(biāo)石埋設(shè): ——1)有巖層露頭或在地面下不深于1.5m的地點(diǎn),優(yōu)先選擇埋設(shè)巖層水準(zhǔn)標(biāo)石。 ——2)沙漠地區(qū)或凍土深度小于0.8m的地區(qū),埋設(shè)混凝土柱水準(zhǔn)標(biāo)石。 ——3)凍土深度大于0.8m或永久凍土地區(qū),埋設(shè)鋼管水準(zhǔn)標(biāo)石。 ——4)有堅固建筑物(房屋、紀(jì)念碑、塔、橋基等)和石崖處,可埋設(shè)墻角水準(zhǔn)標(biāo)志。 ——5)水網(wǎng)地區(qū)或經(jīng)濟(jì)發(fā)達(dá)地區(qū)的普通水準(zhǔn)點(diǎn),埋設(shè)道路水準(zhǔn)標(biāo)石。 64. 新設(shè)的水準(zhǔn)路線與已測的水準(zhǔn)點(diǎn)聯(lián)測或接測時,若該水準(zhǔn)點(diǎn)的前后觀測時間超過【三個月】,應(yīng)進(jìn)行檢測。 65. 水準(zhǔn)儀DS05字母后的數(shù)字表示儀器每公里高差測量的中誤差(以毫米為單位);DS后加字母Z,表示自動安平水準(zhǔn)儀。 66. 往測與返測測站數(shù)均應(yīng)為【偶數(shù)】。 67. 不應(yīng)進(jìn)行觀測: ——① 日出后與日落前30分鐘內(nèi)。 ——② 太陽中天前后各約2小時內(nèi)。 ——③ 標(biāo)尺分劃線的影像跳動劇烈時。 ——④ 氣溫突變時。 ——⑤ 風(fēng)力過大而使標(biāo)尺與儀器不能穩(wěn)定時。 68. 標(biāo)尺讀數(shù)順序: 四等-后后前前;三等-后前前后;一二等:奇數(shù)站-后前前后,偶數(shù)站-前后后前
69. 水準(zhǔn)測量要求
70. 水準(zhǔn)測量誤差 ——①i角誤差:(望遠(yuǎn)鏡)視準(zhǔn)軸與水準(zhǔn)管軸不平行的誤差。減弱措施:測量時使前后視距盡量相等。 ——② 水準(zhǔn)標(biāo)尺每米真長誤差。減弱措施:檢定并禁用超限的標(biāo)尺,計算改正數(shù),保護(hù)標(biāo)尺。 ——③ 一對水準(zhǔn)標(biāo)尺零點(diǎn)不等差。減弱措施:測段采用偶數(shù)站。 71. 跨河水準(zhǔn)適用范圍:二等,視線長度超過100m;三、四等,視線長度超過200m。 72. 水準(zhǔn)測量改正 ——(1)水準(zhǔn)標(biāo)尺長度改正 ——(2)水準(zhǔn)標(biāo)尺溫度改正(一、二等水準(zhǔn)測量) ——(3)正常水準(zhǔn)面不平行的改正 ,緯度南北方向改。 ——(4)重力異常改正(一、二等水準(zhǔn)測量) ——(5)固體潮改正(一、二等水準(zhǔn)測量) ——(6)環(huán)(路)線閉合差的改正 73. 閉合差按照【測站數(shù)/路線長】反號分配。 74. 精度要求
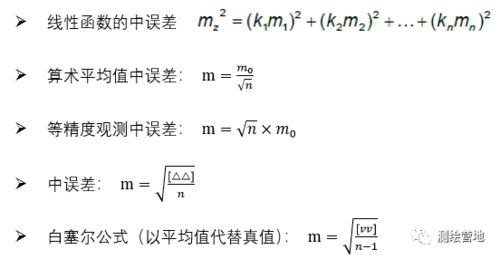
75. 置信度為68.3%時的置信區(qū)間為[ -σ,σ ];95. 4%時的置信區(qū)間為[ -2σ,2σ ];為99.7%時的置信區(qū)間為[ -3σ,3σ ]。 76. 幾種誤差公式
77. 多余觀測數(shù)=總觀測數(shù)-必要觀測數(shù)。 78. 測量平差的目的是解算【估計值】。 79. 測量學(xué)中一般把2倍中誤差作為限差。 部分圖片截取至:測繪迷 |