繪logo")


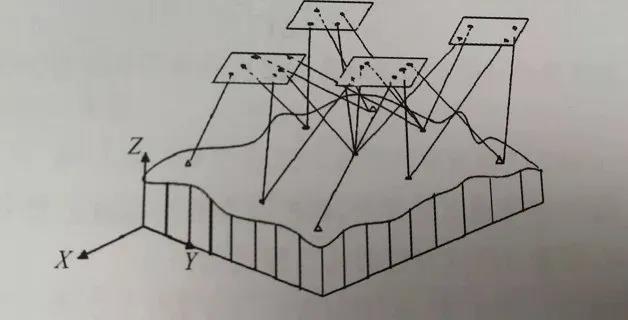
無(wú)人機(jī)航測(cè)入門知識(shí)——空中三角測(cè)量加密1 光束法區(qū)域網(wǎng)空中三角測(cè)量是以一張像片組成的一束光線作為平差的基本單元,是以中心投影的共線方程作為平差的基礎(chǔ)方程,通過(guò)各光線束在空間的旋轉(zhuǎn)和平移,使模型之間的公共點(diǎn)的光線實(shí)現(xiàn)最佳交會(huì),并使整個(gè)區(qū)域最佳地納入到已知的控制點(diǎn)坐標(biāo)系統(tǒng)中去,以相鄰像片公共交會(huì)點(diǎn)坐標(biāo)相等、控制點(diǎn)的內(nèi)業(yè)坐標(biāo)與已知的外業(yè)坐標(biāo)相等為條件,列出控制點(diǎn)和加密點(diǎn)的誤差方程式,進(jìn)行全區(qū)域的統(tǒng)一平差計(jì)算,求解出每張像片的外方位元素和加密點(diǎn)的地面坐標(biāo),見(jiàn)圖1:
 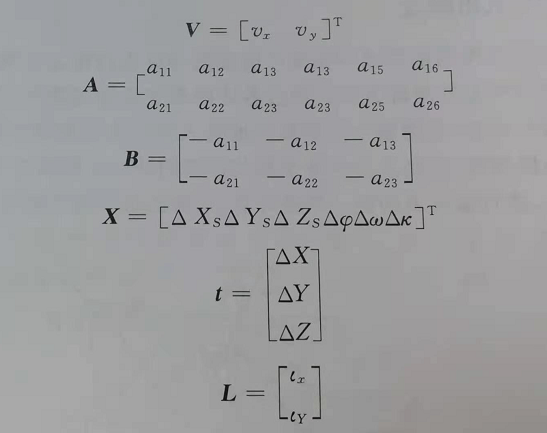 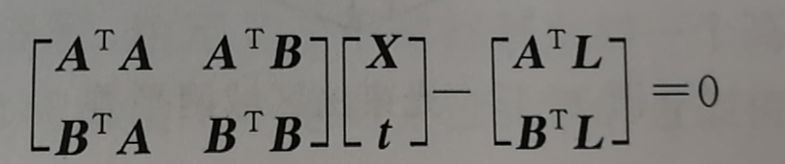 如若全區(qū)有N條航帶,每個(gè)航帶有n張像片,全區(qū)有m個(gè)待定點(diǎn),則該區(qū)域的末知數(shù)為6n X N+3m個(gè)。由此組成的法方程將十分龐大,為了計(jì)算方便,通常消去一類未知數(shù),保留另一類未知數(shù),形成改化法方程式。把上式中的系數(shù)矩陣和常數(shù)項(xiàng)用新的符號(hào)代替,寫成:
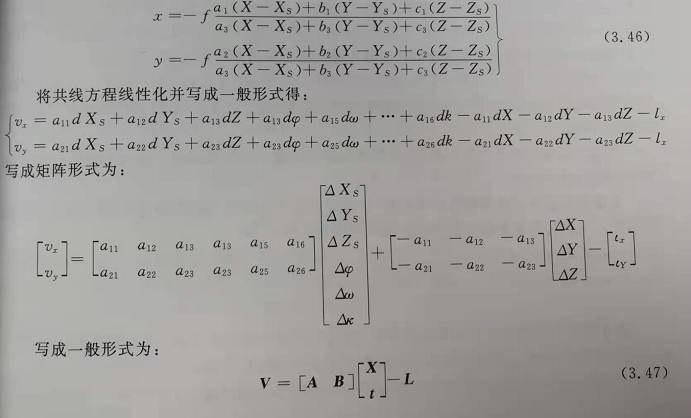
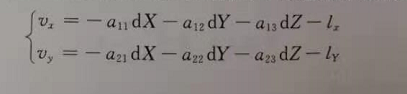
 多像空間前方交會(huì)是根據(jù)共線方程,由待定點(diǎn)在不同像片上的所有像點(diǎn)列誤差方程式進(jìn)行結(jié)算。下式為共線條件方程經(jīng)線性化后的誤差方程式,即:
 01 02 檢查點(diǎn)的平面位置中誤差、高程中誤差分別按以下公式計(jì)算:
03 2  本文限于行業(yè)學(xué)習(xí)交流之用,版權(quán)、著作權(quán)歸原載平臺(tái)及作者所有。我們尊重作者的成果,如涉嫌侵權(quán),請(qǐng)聯(lián)系我們及時(shí)刪除。 |