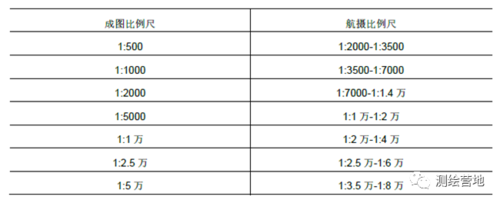
航測與遙感241. 【航攝儀類別】 ——膠片航攝儀:小像幅(18cm×18cm)、正常像幅(23cm×23cm)和大像幅(30cm×30cm)。RC型和RMK型兩種,像幅均為23cm×23cm。 ——數(shù)字航攝儀:框幅式面陣數(shù)字航攝儀(DMC、UCD和SWDC),推掃式測量型數(shù)字航攝儀(ADS)。 242. 【航攝儀檢校】: ——對航攝儀內(nèi)方位元素(像主點在框標坐標系中的坐標(x0,y0)與主距(f))的確定和物鏡光學畸變差的確定是航攝儀檢校的主要內(nèi)容。 ——檢校方法主要包括實驗室檢校法、試驗場檢校法(檢定場要滿足每條航線上最少曝光12次,不少于2條航線的要求)和自檢校法。 ——航攝儀在以下情況之一須進行檢定:新購置,距前次檢定的時間超過2年;快門曝光次數(shù)超過20000次;經(jīng)過較大修理或主要部件更換以后;經(jīng)過劇烈震動以后。 243. 攝影瞬間攝影機的主光軸偏離【鉛垂線】的夾角稱為像片傾角。 244. 【影像分辨率】通常是指地面分辨率,一般以一個像素所代表地面的大小來表示,即地面采樣間隔(GSD) 245. 【航攝參數(shù)】 ——豎直航空攝影:像片傾角(攝影瞬間攝影機的主光軸偏離鉛垂線的夾角)小于2°-3° ——像片比例尺=攝影儀主距/相對航高 ——航線彎曲度不得大于3% ——在一條航線上接近最大旋偏角的像片數(shù)不得超過3張,整個攝區(qū)內(nèi)不超過4% 246. 【航攝技術(shù)設(shè)計】 ——【航攝比例尺】
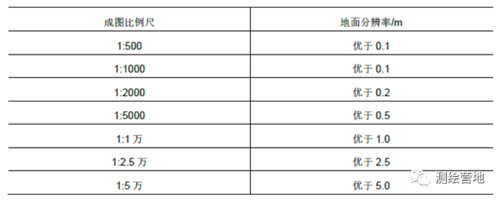
——【分辨率】
——【航攝分區(qū)】:分區(qū)內(nèi)的地形高差一般不大于1/4相對航高(以分區(qū)的平均高度平面為攝影基準面的航高);當航攝比例尺大于或等于1:7000(或地面分辨率小于等于20cm)時,不應(yīng)大于1/6相對航高;分區(qū)內(nèi)的地物景物反差、地貌類型應(yīng)盡量一致;在地形高差許可的情況下,航攝分區(qū)的跨度應(yīng)盡量劃大。 ——【航線敷設(shè)】:常規(guī)方法敷設(shè)航線時,航線應(yīng)平行于圖廓線。位于攝區(qū)邊緣的首末航線應(yīng)設(shè)計在攝區(qū)邊界線上或邊界線外。旁向覆蓋超出界線一般不少于像幅的50%,最少不得少于30%。航向超出測區(qū)不少于一條基線。 ——【架構(gòu)航線】:應(yīng)比測圖航線的航攝比例尺大25%左右,應(yīng)有不小于80%的航向重疊度。 ——【航攝時間】:高差特大的陡峭山區(qū)和高層建筑物密集的大城市,限在當?shù)卣缜昂蟾?小時進行攝影;沙漠、戈壁灘等地面反光強烈的地區(qū),一般在當?shù)卣缜昂蟾?個小時內(nèi)不應(yīng)攝影。 247. 【航攝因子計算】:航攝因子包括地區(qū)困難類別、分區(qū)面積、航攝比例尺、分區(qū)平均平面高程、絕對航高、基線長度、航線間隔、航線長度、分區(qū)相片數(shù)等。(航線條數(shù)和每條航線影像數(shù)向上取整) ——基線長度=影像寬度×(1-航向重疊)×攝影比例尺分母 ——航線間隔=影像高度×(1-旁向重疊)×攝影比例尺分母 ——分區(qū)航線條數(shù)=分區(qū)寬度/航線間隔,攝區(qū)邊界分區(qū)加一條線 ——航線長度=分區(qū)長度+兩條基線長度 ——每條航線影像數(shù)=航線長度/基線長度+2 ——分區(qū)總像片數(shù)=分區(qū)航線條數(shù)×每航線影像數(shù) ——總模型數(shù)=總相片數(shù)-航線數(shù) ——最高點航向重疊度=航向重疊度+(1-航向重疊度)×(基準面-最高點)/相對航高 ——最低點航向重疊度=航向重疊度+(1-航向重疊度)×(基準面-最低點)/相對航高 ——最高點旁向重疊度=旁向重疊度+(1-旁向重疊度)×(基準面-最高點)/相對航高 ——最低點旁向重疊度=旁向重疊度+(1-旁向重疊度)×(基準面-最低點)/相對航高 248. 無人機航攝時,設(shè)計飛行高度應(yīng)高于攝區(qū)和航路上最高點100m 以上(避免無人機撞山)。設(shè)計總航程應(yīng)小于無人機能到達的最遠航程(避免動能耗盡造成飛行事故) 249. 機載側(cè)視雷達分辨率可分為距離分辨率(垂直于飛行的方向)和方位分辨率(平行于飛行的方向)。 250. 定位定姿系統(tǒng)(POS)是慣性測量裝置(IMU,獲取外方位角元素,實時姿態(tài))與差分全球定位系統(tǒng)(DGPS,獲取外方位線元素,實時坐標)組合的高精度位置與姿態(tài)測量系統(tǒng)。 251. 【航攝質(zhì)檢】 ——飛行質(zhì)量檢查。航攝飛行質(zhì)量包括:航攝像片的重疊度,像片傾斜角,像片旋偏角,航線彎曲度,航高保持,攝區(qū)、分區(qū)、覆蓋保證,飛行記錄資料的填寫等等。 ——攝影質(zhì)量檢查。影像應(yīng)清晰,層次豐富,反差適中,色調(diào)柔和;應(yīng)能辨認出與地面分辨率相適應(yīng)的細小地物影像,影像上不應(yīng)有云、云影、煙、大面積反光、污點等缺陷。 252. 【投影差】 ——地形起伏引起的像點位移:地面起伏引起的像點位移使得地面目標物體在航攝像片上的構(gòu)象偏離了其正射投影的正確位置,又稱投影差。 ——投影差性質(zhì):①像底點沒有投影差;②地面點相對于基準面的高差越大,投影差越大;③攝影機的主距越大,相應(yīng)的投影差越小。 ——城區(qū)航空攝影時,為了有效減小航攝像片上投影差的影響,應(yīng)選擇【焦距較長】的攝影機進行攝影。 253. 【內(nèi)方位元素】。內(nèi)方位元素是描述攝影中心與像片之間相互位置關(guān)系的參數(shù),包括3個參數(shù),即像主點在框標坐標系中的坐標(x0,y0)及攝影中心到像片的垂距f(主距)。內(nèi)方位元素值一般視為已知,它可通過對攝影儀的檢定得到。 254. 【外方位元素】。確定攝影光束在攝影瞬間的空間位置和姿態(tài)的參數(shù),稱為外方位元素。一張像片的外方位元素包括6個參數(shù):三個線元素(XS,YS,ZS)和三個角元素(φ,ω,κ)。線元素是用來描述攝影瞬間,攝影中心S在所選定的地面空間坐標系中的坐標值;角元素是用來描述攝影瞬間,攝影像片在所選定的地面空間坐標系中的空間姿態(tài)。 255. 外方位元素可以利用地面控制點通過計算得到,或者利用POS系統(tǒng)(定位定姿系統(tǒng))測定。POS系統(tǒng)由IMU(慣性測量裝置)和GPS組成,IMU測定姿態(tài),GPS測定位置。 256. 空間后方交會,一共需要解求6個未知數(shù),需要列出6個方程,需要最少3個控制點。 257. 共線方程就是指中心投影的構(gòu)象方程,即在攝影成像過程中,【攝影中心】S(XS,YS,ZS)、【像點】a(x,y)及其對應(yīng)的【地面點】A(X,Y,Z)三點位于一條直線上。 258. 立體像對指由不同攝站獲取,具有一定重疊區(qū)域的兩張像片。影像沿拍攝順序從左到右放置,左右像片上同一地物點所構(gòu)成的像點稱為同名像點。 259. 【內(nèi)定向】:根據(jù)像片的框標坐標和相應(yīng)的攝影機檢定參數(shù),恢復像片與攝影機的相關(guān)位置,即建立像片坐標系(掃描坐標到像片坐標)。 260. 【相對定向】:暫不考慮外方位元素,確定立體像對兩張影像相對位置關(guān)系,建立任意比例尺和方位的像對立體模型的過程稱為相對定向。相對定向不需要外業(yè)控制點,同名點投影光線對對相交是相對定向的理論基礎(chǔ)。描述立體像對兩張像片相對位置和姿態(tài)關(guān)系的參數(shù),稱為相對定向元素(共5個)。 261. 【絕對定向】:元素共7個,其中3個線元素、3個角元素、1個縮放元素。為求解這7個元素,至少需要兩個平高控制點和一個高程控制點。 262. 【大氣窗口】:電磁波在通過大氣層時較少被散射、吸收和反射,具有較高透過率的波段稱為“大氣窗口”。常用的大氣窗口包括:紫外、可見光、紅外(近紅外、中紅外、遠紅外)、微波。 263. 對地物波譜的測定主要分三部分,即反射波譜、發(fā)射波譜和微波波譜。 264. 遙感圖像特征可歸納為幾何特征、物理特征和時間特征,這三方面的表現(xiàn)特征即為空間分辨率、光譜分辨率和時間分辨率。 265. 【遙感圖像計算機分類】方法包括監(jiān)督分類和非監(jiān)督分類。 ——監(jiān)督分類:事先有類別的先驗知識,根據(jù)先驗知識選擇訓練樣本,由訓練樣本得到分類準則。 ——非監(jiān)督分類:事先沒有類別的先驗知識,純粹根據(jù)圖像數(shù)據(jù)的統(tǒng)計特征和點群分布情況,根據(jù)相似性程度自動進行歸類,最后再確定每一類的地理屬性。 266. 將全色影像和多波段遙感影像融合處理,得到既有全色影像的高分辨率,又有多波段影像的彩色信息的影像。 267. 在標準假彩色合成圖像中,三種主要的地表覆蓋類型:植被呈紅色系列,水體呈藍色系列,裸地呈淺色系列。 268. 【像控點】 ——分為全野外法布點和非全野外法布點(野外+空三,單航線布點和區(qū)域網(wǎng)布點)。 ——像控點應(yīng)選在旁向重疊中線附近 ——像控點距像片上各類標志應(yīng)大于1mm ——像控點距像片邊緣不小于1cm(18cm×18cm)或1.5cm(23cm×23cm) ——刺點誤差和針孔直徑不大于0.1mm 269. 【像控點精度】 ——平面精度:對于1:500 – 1:2000 地形圖,像控點相對于鄰近控制點的平面中誤差不超過地物點平面中誤差的1/5;對于1:5000 - 1:10 萬地形圖,不超過圖上±0.1mm。 ——高程精度:對于1:500 - 1:1 萬地形圖,高程中誤差不超過1/10 基本等高距。 270. 【調(diào)繪與補測】 ——像片調(diào)繪可采用全野外調(diào)繪法或室內(nèi)外綜合調(diào)繪法。目前大多采用先室內(nèi)判繪,后野外檢查補繪的辦法來完成。 ——需要野外補測的內(nèi)容有影像模糊地物,被影像或陰影遮蓋的地物,航攝時的水淹、云影地段,不滿幅的自由圖邊,新增地物。 271. 【空中三角測量】是利用航攝像片與所攝目標之間的空間幾何關(guān)系,根據(jù)少量像片控制點,計算待求點的平面位置、高程和像片外方位元素的測量方法。空中三角測量為影像糾正、DEM 建立和立體采集提供定向成果,其主要輸出成果是像片加密點大地坐標及像片的外方位元素。 272. 空中三角測量的作業(yè)過程主要包括準備工作、內(nèi)定向、相對定向、絕對定向和區(qū)域網(wǎng)平差計算、區(qū)域網(wǎng)接邊、質(zhì)量檢查、成果整理與提交七個環(huán)節(jié)。 273. 對于區(qū)域網(wǎng)接邊,同比例尺不同地形類別接邊或不同比例尺接邊時,平面位置較差和高程較差滿足規(guī)定要求后,將實際較差按中誤差的比例進行配賦作為平面和高程的最后使用值。 274. 光束法解析空中三角測量是最嚴密的一種平差方法。 275. 空三平差精度檢查:主要是檢查內(nèi)定向、相對定向、絕對定向和區(qū)域網(wǎng)接邊等精度。 276. DEM是制作DOM 的基礎(chǔ)數(shù)據(jù)。 277. 數(shù)字高程的格網(wǎng)尺寸依據(jù)比例尺選擇,通常1:500 至1:2000 的格網(wǎng)尺寸不應(yīng)大于0.001M (M為成圖比例尺分母),1:5000 至1:10 萬不應(yīng)大于0.0005M。 278. 影像空間信息文件為ASCII 文本格式,坐標起算點為影像左上角像素中心坐標。 279. 【DLG、DEM、DOM生產(chǎn)作業(yè)流程】
|