關于太空中GNSS應用的探討在過去幾年中,GNSS系統在空曠場景中達到了很好的定位效果,然而在城市區域、隧道等地區的定位工作依然是研究的熱點。本文主要探討復雜環境中GNSS系統的使用。
圖 1 Dove GNSS 定規路徑
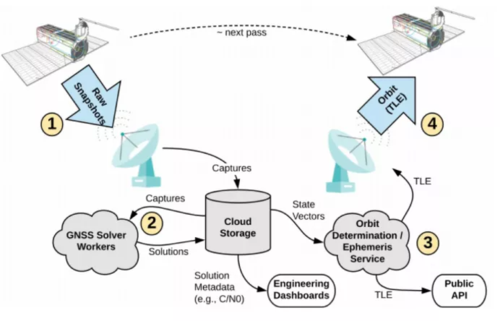
軌道模型通過非線性最小二乘法擬合到GNSS狀態向量。軌道模型由笛卡爾狀態向量和彈道系數組成。整個處理流程是自動化的,運行在可擴展的云計算解決方案上。將GNSS樣本處理從衛星上移開的代價是增加軌道確定過程的延遲。 《低軌飛行任務中空間GNSS接收機的精確實時在軌軌道確定(P2OD)性能評估》這篇文章介紹了空間PPP接收機在典型LEO任務中的首次實驗室性能評估,目標是達到技術成熟水平(TRL-6),并在空間環境下進行了系統原型演示。 為了進行初步的P2OD算法評估,研究人員使用了Sentinel-3A數據、Fugro的PPP軟件和精確的GPS軌道/時鐘(參考天線參考點(ARP))對動態PPP解決方案與從質量軌道和姿態信息(四元數)中心獲得的基于ARP的Sentinel-3A軌道進行了比較。已為2018年5月的每一天生成了兩種運動學解:
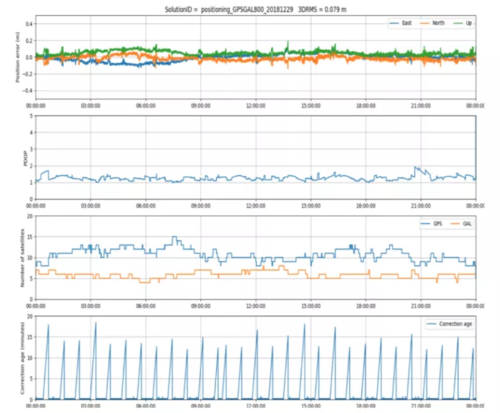
圖 2 奧斯陸 GPS+GAL PPP 定位結果 PPP數據校正鏈路將使用國際海事衛星組織的L波段實時信號和L波段調制器進行驗證,該調制器將用于模擬預計在低軌軌道上增加的多普勒,使用射頻星座模擬器(RFCS)測試原始GNSS測量(如偽距、載波相位等)和獨立雙頻PVT解決方案的質量。模擬的全球導航衛星系統接收器軌跡可以從低軌衛星(如ESA-EO)的真實任務后精密星歷中提取,也可以從低軌軌道的任意表示中提取。除了此機載吊艙精度驗證外,還將使用射頻星座模擬器和實驗室試驗臺來支持性能和功能要求的驗證,如冷啟動和熱啟動能力、首次修復時間(TTFF)、精確修復時間(TTPF):故障檢測。接插和卸載功能、地面可升級性能等。 系統的原型目前由Deimos Space UK領導的聯營集團根據ESA(歐洲航天局)的合同進行開發,計劃于2020-2021年進行CubeSat在軌示范。該文持續進行的驗證活動的初步結果顯示了該集團迫切希望在實際場景條件下所進行的性能驗證是非常有前景的。 1. J.M. Palomo, P. D'angelo, P. F. Silva, A.J. Fernández, DEIMOS Space, Spain; P. Giordano, P. Zoccarato, ESA-ESTEC; J. Tegedor, O. Oerpen, Fugro Norway AS, Norway; L.B. Hansen, GomSpace A/S; C. Hill, T. Moore, The University of Nottingham, UK. Space GNSS Receiver Performance results with Precise Real-Time On-board Orbit Determination (P2OD) in LEO Missions. ION GNSS+ 2019. |