剖析電子測角原理,帶你深入了解全站儀!全站儀電子測角系統有三種:光柵度盤測角系統、編碼度盤測角系統和動態測角系統。光柵度盤測角系統屬于增量式電子測角系統,早期的全站儀,大多采用光柵度盤測角系統。主光柵與指示光柵的線條寬度和柵距d相同。
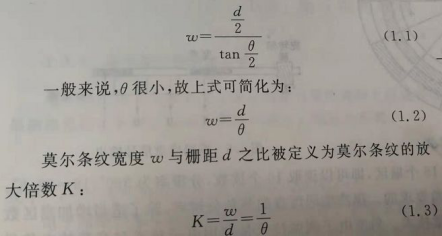
在徑向均勻地刻有許多等間隔線條的玻璃圓盤稱為光柵度盤。光柵度盤測角系統通常要由兩個光柵度盤組成,其中一個稱為主光柵,另一個稱為指示光柵。但兩度盤的光柵方向形成一個很小的角度θ,如圖1.3所示。當兩個間隔相同的光柵成很小的交角相重疊,在它們相對移動時可以看到明暗相間的干涉條紋,稱為莫爾干涉條紋,簡稱莫爾條紋。
由于θ很小,因此K值很大,也就是說,莫爾條紋起著放大作用,這樣大大提高了分辨率。而且θ越小,K值越大。由此可見,要知道光柵相對移動的數目,只須測出莫爾條紋的移動數目。當光柵相對移動一個柵距d時,莫爾條紋就沿垂直于光柵相對移動的方向移動一個條紋寬度ω。
利用光柵度盤測角就是要測定從起始方向兩個光柵度盤相對移動的光柵數,因此這種測角方式稱為增量式測角。增量式測角易于制造,早期的全站儀大多采用這種方式測角,其缺點是每次開機需要進行角度初始化、且關機后不能保持關機時的測角狀態。
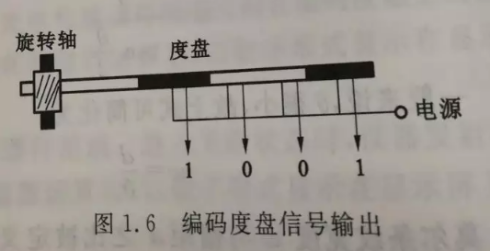
光學編碼度盤是在度盤上刻數道同心圓,構成若干碼道,同時將度盤等間隔地劃分為若干扇區,在各扇區內不同的碼道上按規律設置導電區和絕緣區,用導電和不導電分別代表二進制中的“1”和“0”。圖1.5為四碼道16扇區四位編碼度盤,在碼盤下方安置電信號輸出電路。測角時度盤隨照準部旋轉到某目標不動后,由該扇區的導電區與不導電區得到其組合電信號。
圖1.6的編碼度盤信號輸出為1001。輸出的組合電信號通過譯碼器將其轉換為角度值,并在顯示屏上顯示。
圖1.5的四位編碼度盤,有16個扇區,即可以讀取16個讀數,分辨率為360°/16=22.5°。顯然,這個分辨率是不能滿足測角要求的。提高編碼度盤的測角分辨率,除了適當增加扇區數和碼道數外,主要是采用電子測微技術,角度電子測微技術是利用電子技術對交變的電信號進行內插,從而提高計數脈沖的頻率,達到細分效果,提高測角分辨率。
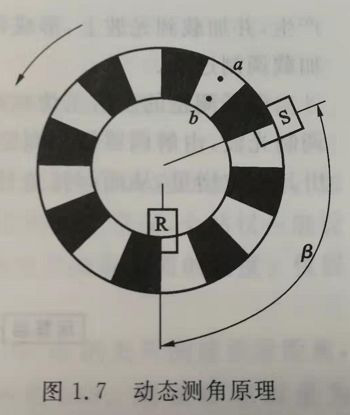
動態測角系統的度盤為環狀度盤,如圖1.7所示,度盤上刻劃等間隔的明暗分劃線,明的透光,暗的不透光,相當于柵線和縫隙,一對明暗分劃線為一個柵格,其柵距(間隔角)為Φ。度盤內外邊緣裝有兩個光欄(光電傳感器)S和R。S為固定光欄,位于度盤外側;R為可動光欄,隨照準部一起轉動,位于度盤內側。同時,度盤上還有兩個標志點a和b,S只接收α的信號,R只接收b的信號。測角時S代表任一原方向,R隨著照準部旋轉,當照準目標后,R位置已定,此時啟動測角系統,使度盤在馬達的驅動下,始終以一定的速度逆時針旋轉,b點先通過R,然后開始計數。接著ɑ通過S,計數停止,此時記下了R、S之間的柵距(Ф0)的整倍數n和不足一個刪距的小數部分△Ф,則水平角為:β=nФ0+△Ф
實際上,一個柵格為一個脈沖信號,水平角的柵距(Ф0)整倍數n由R、S的粗測功能計數測得;不足一個柵格的小數部分△Ф由R、S的精測功能測得。粗測和精測的信號經計算送到中央處理器,然后由顯示屏顯示或記錄于數據終端。
|