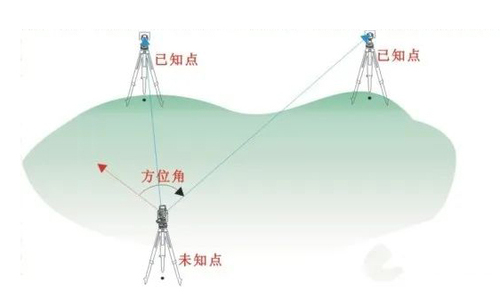
UFO全站儀后方交會測量方法什么是后方交會?后方交會是指在某一個待定點P架設全站儀,通過測量兩個及兩個以上的已知點的方式計算出P點的坐標。
后方交會可以實現在待定點上設站,向兩個已知控制點觀測水平角A和到控制點的距離,計算待定點的坐標。一般采用全站儀這種測量儀器來進行。 一、下面以UFO全站儀T5為例為大家講解后方交會的操作。 第一步 在全站儀的常規測量界面,按數字7進到主菜單,選擇3【程序】;然后在程序菜單中選擇5【后方交會】,按ENT鍵進入;
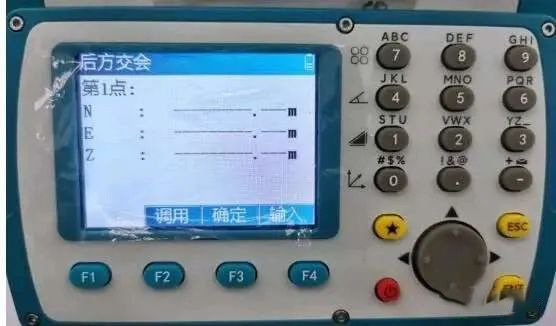
第二步 輸入已知點數據 首先按F4【輸入】,輸入已知點的坐標;如果內存中有已知點的數據,可以按F2【調用】進入內存點列表界面進行選擇。
第三步 輸入第一個點,按F3【確定】,然后依次輸入第二、三的點。 如果只添加兩點,當第二個點輸入以后,點擊F1【測量】,會提示確認已經輸入所有的目標,點擊確定。
第四步 將全站儀先照準第一個已知點,瞄準好以后在測距頁面點擊F1【測距】,這時會直接出來測距結果;如果還需要高程就要記得輸入棱鏡高 點擊按鈕F3【是】,繼續瞄準并測量第2個點
第五步 當所有已知點觀測完成,點擊F2【計算】顯示后方交會的結果;如果需要使用當前后方交會的坐標,點擊【設站】,當前位置即可作為測站;如果想要記錄交會的坐標,點擊按鈕F3【記錄】,輸入點名,當記錄完成后儀器會自動把當前位置設成測站。
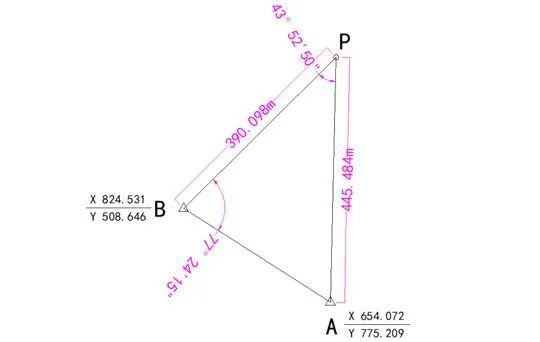
二、計算方法 1、觀測 在P點架設好儀器,以A點置零,觀測B點的水平角讀數,觀測至A點的距離、B點的距離。如下圖所示,已知點A和點B,以及A、B兩點到P點的距離,求P點的坐標。
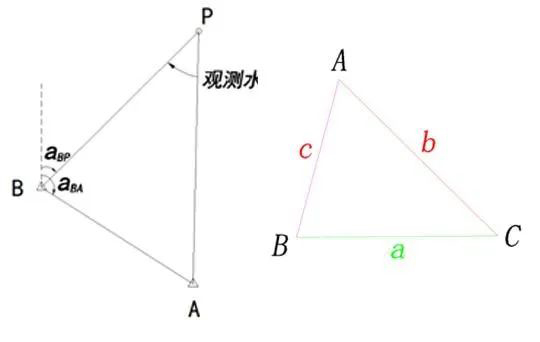
2、計算P點坐標 根據坐標正算的基本公式,計算P點坐標,未知量為B點(或A點)至P點的方位角aBP(或aAP),求出該方位角,即可計算出P點的坐標。而aBA方位角為已知,計算出aBP,計算出B點出的角度∠PBA即可。
坐標正弦定理 (1)計算aBA方位角。根據A、B坐標進行坐標反算求得。計算出以上例子aBA方位角為:122°35′52″。 (2)計算∠PBA。由于觀測了SPB、SPA及∠APB,利用正弦定理即可計算出∠PBA為:77°24′15″。 (3)計算B-P坐標方位角aBP。再根據坐標反算得aBA方位角,即可計算出aBP方位角為: 122°35′52″-77°24′15″=45°11′37″。 (4)計算P點坐標。根據坐標正算公式,根據觀測距離DPB、aBP坐標方位角,可以計算出P點坐標:X=1099.4390m,Y=785.4165m。 三、后方交會的好處與弊端 1、好處:測站無需對中、無需做點、沒有設站的對中誤差、距離放樣點更近。而且兩個控制點之間不通視沒辦法定向時,也可以采用后方交會來解決測站定向的問題。 2、弊端:如果根據坐標正算的基本公式,計算P點坐標,未知量為B點(或A點)至P點的方位角aBP(或aAP),求出該方位角,即可算出P點的坐標。在計算過程中以C為起點,計算的坐標方位角與以A為起點算的坐標不一致。并且兩組計算坐標存在2MM左右差值。這個誤差是利用全站儀后方交會時顯示的差值,由于多余觀測數據引起的。 注:測量數據可以進行簡單的平差計算(誤差分配取中數)后使用。 以上就是UFO全站儀后方交會測量方法,如果你還有什么不了解的地方,歡迎留言或者在線咨詢,我們會及時與您聯系。東英測繪儀器有限公司提供RTK/GPS、全站儀、水準儀、經緯儀、無人機等測繪儀器的銷售、租賃、檢定、校正、維修等服務,也承接測繪培訓與各種內外業工程測量任務,有相關的需要了解都可以留言或者在線咨詢我們,我們將詳細為你解答。 |